上QQ阅读APP看本书,新人免费读10天
设备和账号都新为新人
1.1 机器人视觉感知系统
在众多的感知手段中,机器人视觉感知系统是最重要的感知手段之一。人类获取的信息83%来自视觉系统,而机器人视觉感知系统是人类视觉在机器人上的延伸。作为机器人的眼睛,视觉感知系统能自动获取视觉信息,并基于获取的视觉信息实现自动测量、检测、跟踪、分析判断和决策控制等功能。
机器人智能视觉感知系统具有信息快速获取、高集成度、智能化等优点,正逐渐成为智能交通、工业自动化检测、生物医学成像与分析、国防安全、航空航天等关系国计民生重要领域的核心系统。如智能移动机器人需要在非结构化环境中完成自主导航,需要实时、可靠、准确地获取非结构化环境的相关信息。移动机器人中常用的传感器有超声传感器、红外传感器、激光测距仪、激光雷达和视觉传感器等。这些传感器虽然能检测到一维距离或二维图像等信息,但在非结构化环境中的移动机器人还很难通过这两类不完整性信息描述环境。
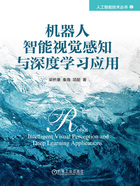
为此,研究者分别提出基于3D视觉技术的信息获取、基于激光雷达的视觉信息获取、基于TOF相机的三维信息获取、基于RGBD相机的三维信息获取等新的方案实现环境的结构化。图1-2描述了机器人视觉感知系统的主要构成。机器人视觉感知系统由硬件系统和软件系统组成,硬件系统包括采集控制装置、图像采集系统、视频信号数字化设备、视觉信号处理器,其中,视觉处理器可以由嵌入式系统、PC、工控机和具备GPU单元的高性能服务器等构成,而嵌入式系统可以完成I/O数据采集、运动控制、图像处理和识别等核心功能。软件系统包括机器人控制软件、视觉处理软件、计算机系统软件,其中,视觉处理软件能实现视觉信息的预处理、分割、检测、识别、解释等功能。

图1-2 机器人视觉感知系统